
|
||||||||||||||
|
|
The SCEC PBIC has been developing a relatively simple method of calibrating electromagnetic Seismomters. The method is described in a paper titled "Signal Coil Calibration of E-M seismometers" (PDF format) published in the Bulletin of the Seismological Society of America, Vol. 85, No. 3, pp. 845-850, June 1995. Hardcopy reprints are available upon request from the PBIC. The response terms and symbols conversions are provided for translating symbols used in the paper to terms used in other documentation (including this web site).
The basic idea is that you record a pulse from the geophone as the mass is released from an offset position. The input function is therefore a square wave. The actual output is recorded. From that you can get information about the response characteristics of the geophone. The mass offset is attained by applying a current directly to the sensor coil. You then record the output of the sensor (directly from the coil again) once the current is released. A simple DPDT switch is used to switch the sensor coil from the current source to the recorder. The current used to offset the mass must be logged by hand. The recorded signal is run through a characterization program (llnlid) which outputs the damping factor, the natural period of the sensor and a dimensionless sensitivity constant (GNid). The current, the mass and the GNid value are all that is needed to get the actual sensitivity of the sensor. The damping factor (Did) and the natural period (Tid) summarize and the sensitivity value (Gid) summarize the response characterization of the geophone. Other values, such as coil resistance, shunt resistance are important to have a complete picture of the sensors characteristics.
To directly compare signals between different recording sites with separate sensors, the response characteristics must be similar. This is possible through several methods. The first and most obvious is to make sure that the sensors are all of the same type and have similar damping arrays installed. Another method allows the use of slightly different sensors that have similar frequency characterstics. A more complicated damping array is then used to attenuate the output sensitivity to some pre-chosen sensitivity that is used as a standard. The need for research to solve larger problems has driven researchers to combine efforts towards larger, cooperative projects where different institutions combine resources to increase the data collection capabilities over what any one institution could do alone.
The primary reasons to use sensor calibration is to
allow removal of the instrument response from recorded
seismograms. Removing the instrument response gets
you a signal that represents the actual ground motion.
Once that is done, you can directly compare signals
recorded from different sensors.
This process, called deconvolution, is done over a
user specified frequency range. So as long as all
of the sensors to be compared have a reasonable
sensitivity at that frequency range, the resulting
signals can be compared directly.
Another benefit of calibrating seismometers is the
ability to track performance over time. There is
concern that some sensors may "age", meaning that
the characteristics of the springs that support the
mass may change over time.
Yet another benefit is the ability to catch sensor
problems that may go unnoticed otherwise.
"Leakage", when water gets into a sensor, can easily
be missed on a routine metering of a sensor, but
shows up quite obviously as an extremely overdamped
response during calibration.
We highly recommend that technicians and engineers
apply both positive and negative pulses to the sensors.
This will point out problems with non-linearity of
response in the different directions. In the horizontal
components of a three component sensor, this typically
indicates that the sensor is not leveled adequately.
The calibration pulses can be used iteratively to adjust
the bubble so that the sensor can be leveled accurately again.
While the response calibration method is relatively simple, the processing setup does require some training to make everything work. There is some online documentation. The Response software components page includes breakdowns of the components and how they interrelate. It is useful for anyone who needs to run the software. There is also a FAQfor some of the basics. While only the mass, current and GNid are needed to calculate the instrument response, the software attempts to gather together a lot of other information about the sensor so that a single sheet that completely describes the sensor is produced. This is probably the main weakness of the whole system. At some point, I am hoping to streamline the system even more and isolate out the tasks of calculating response and gathering information.
The calibration process created at the PBIC is focused on one method of data collection and processing. Other users have different data collection and processing needs. The Midstream processing documentation describes some of the steps needed for utilizing the PBIC response code to process data that has been collected over a network or has already had some processing performed on it. A more detailed description of the procedures is under development. The end result of the PBIC developed process is to produce a PostScript file with all the parameters summarized on a single sheet of paper. An digitized image of an example output cal response sheet.
The summary output from the response program is in the following format.
Some DASs have Low Noise Modules (LNMs) installed for recording FBA signals at maximum resolution on the 16bit channels. On occasion, L43Ds or other velocity transducers are recorded on these LNMs. The low input impedence of the LNMs is well suited for the active output of the FBAs, but ends up adding additional damping to the response of velocity transducers. The following LNM Response Calibration Results are for some of the SCEC PBIC L43Ds. The format of these records is the same as that described above.
I will try to complete these
results in the near future. These results will provide general
info for response calibration of the PBIC sensors. The amplitude
corrections for the gain of 1.5 of the LNMs has been incorporated
into these response values. The reftek headers can only record
preset integer values for gain (1, 8, 32, 128, 512, 1024, 2048, 8192),
so whatever the real gain of a LNM is, it will be displayed as
one of those previously shown gain values. Typically the gain
value programmed into the reftek when using LNMs should be 1.
If the value shown in the file headers is other than 1, the values
should be corrected in the converted sac files using the div or mul
commands. As an example, if the gain was programmed into the reftek
as 32, but the system had LNMs installed. The user should make
the following corrections to the sac files:
% sac sac> read *.*.*.sac sac> mul 32 sac> write over sac> quit
This will convert the values to what they would have been if the reftek headers had the gain set to 1. Once this is done, the values shown in the link above will correct for the additional gain of 1.5 which must be divided out of the input.
NOTE: with the x1.5 LNMs installed the amplitude values are not actually very far off from the amplitudes expected from a record at a gain of 1. This is because even though the recorded signal is amplified by 1.5 times, the additional damping of the sensor due to the low input impedence attenuates the amplitude of the sensor signal by roughly the same amount. This means that the amplitudes will match the users expectations, but that the waveforms will in fact have a much different response than expected.
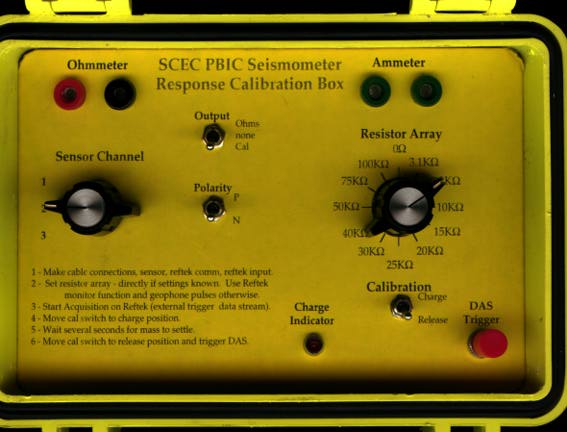
Required hardware for using this method of calibration includes a response calibration box. A picture of one of the units designed and constructed at the PBIC is included below. Three component seismometers are more easily handled if there is an input switching mechanism that allows the technician to connect each of the components to the same channel of the recorder one after the other. A schematic of the cal box, input switching box and signal coil and damping array notation is included below. The pbic designed response calibration boxes have the input switching box built into the same unit.
Picture of prototype calbox
Cal Box Cable Pinout
Cal Box Schematics
in certain cases users may need to convert data files values from counts to volts. The 16 bit reftek input is a direct analog to digital conversion from a range of 7.5 volts over the 2**16 bit range (65536). The 24 bit digitizer uses a bit stream that is not as easily quantifiable. The 24 bit value shown below is the one calculated by UCSD, and used during processing of the data from the Landers and Northridge RAMP experiments.
16b reftek input, 114.4 microvolts/count 24b reftek input, 1.907 microvolts/count
The PBIC uses this calibration method in-house to monitor response
characteristics of SCEC owned equipment.
This method has also been used by the SCEC PBIC and PASSCAL to
calibrate sensors used in some large SCEC experiments including:
The calibration system used here can be done much more efficiently and quickly in the lab than in the field. However there are some very good reasons to put forth the extra effort to run calibrations in the field, especially for longer deployments. The researchers and field personnel for any given project will need to weigh the benefits against the additional time and effort spent in the field.
If the decision is made to do calibrations in the field, I have found that its easiest to set up one DAS and just go around to the different stations recording the cal pulses onto that one box. These can often be recorded to RAM and then dumped to disk and then onto the workstation later. Make sure that you chose a DAS that has good backup batteries so that the data is retained between powerups! We ran into problems with this during the Hectormine deployment where we didn't notice the problem until after we had done cals on about 7 or 8 sites and had to go back and redo over thirty minutes of work. When we redid the cals we dumped the RAM to disk after every three or four stations to minimize the chance of losing any additional data.
| Aliases | Data Type | Description | Units |
|---|---|---|---|
| filename,file | string | The response recording file name | |
| owner,own | string | Sensor owner | |
| site,sit | string | Site where cal was recorded | |
| model,mod,type,senstype,sensor | string | Sensor Model | |
| sn,ser,serial,serialnum,s#,sn# | string | Sensor Serial Number | |
| opt,optdes,option | string | Optional info | |
| comp,cmp,c | string | Sensor component | |
| pol | string | Pulse polarity | |
| Gd,Gs,Gdamp | float | Damped sensitivity Calculated | V/m/s |
| Guid | float | Undamped sensitivity calculated from observed Gid | V/m/s |
| Gmfgr | float | Undamped sensitivity from manufacturer | V/m/s |
| Gid | float | Observed sensitivity from llnlid info and Iext | V/m/s |
| Iext | float | Current measured during calibration pulse | ma |
| Rc,Rcoil | float | Coil resistance (usu. from an accurate measurement) | ohms |
| Rd,Rdeo,Rdpar,Rs,Rshunt,Rdamp | float | Shunt resistance | ohms |
| Rdsr,Rdsr1 | float | Resistance in series with shunt between shunt and coil | ohms |
| Rdsr2 | float | Resistance in series with shunt between shunt and coil (if a pair is used) | ohms |
| Mmfgr,Mass,mass,m | float | Weight of sensor mass | Kg |
| Rmfgr | float | Coil resistance from manufacturer | ohms |
| Tmfgr,T | float | Natural period of sensor from manufacturer | seconds |
| Fmfgr,F | float | Natural frequency of sensor from manufacturer (1/Tmfgr) | Hz |
| cal,calconst,calconstant,Cmfgr | float | Calibration constant of sensor from manufacturer | |
| Dmfgr,Dopen | float | Open Circuit damping constant of sensor from manufacturer | % of critical |
| Dcalc | float | Damping constant of sensor (Calculated from Dmfgr) | % of critical |
| Rmeas,Rcmeas | float | Resistance of sensor including damping array | ohms |
| Rext | float | Inline resistance used with calibration box to limit current | ohms |
| Isig | float | Current calulated as Iext * Atten (seems to be unused now) | ma |
| Vext | float | Voltage across sensor and damping array. Used to calculate Iext if Iext doesn't exist. Typically this is not as accurate. | volts |
| Did | float | Damping constant (from llnlid program) | % of critical |
| GNid | float | Dimensionless sensitivity constant (from llnlid program). Used to calculate Gid | dimensionless constant |
| Tid | float | Natural Period (from llnlid program) | Hz |
| Fid | float | Natural frequency (from llnlid program 1/Tid) | seconds |
{kind=link}
{kind=link}